About

Hi, I’m Michael Granberry and welcome to my portfolio site. 👨🏽💻
In Fall 2023, I received a bachelor's degree in computer engineering with a minor in computer science from California State University, Northridge (CSUN).
I work at Teradyne as a Mixed Signal ASIC Characterization Engineer. Beyond my professional endeavors, I enjoy embedded systems, robotics, computer vision, and FPGA development for both personal and academic purposes.
Projects
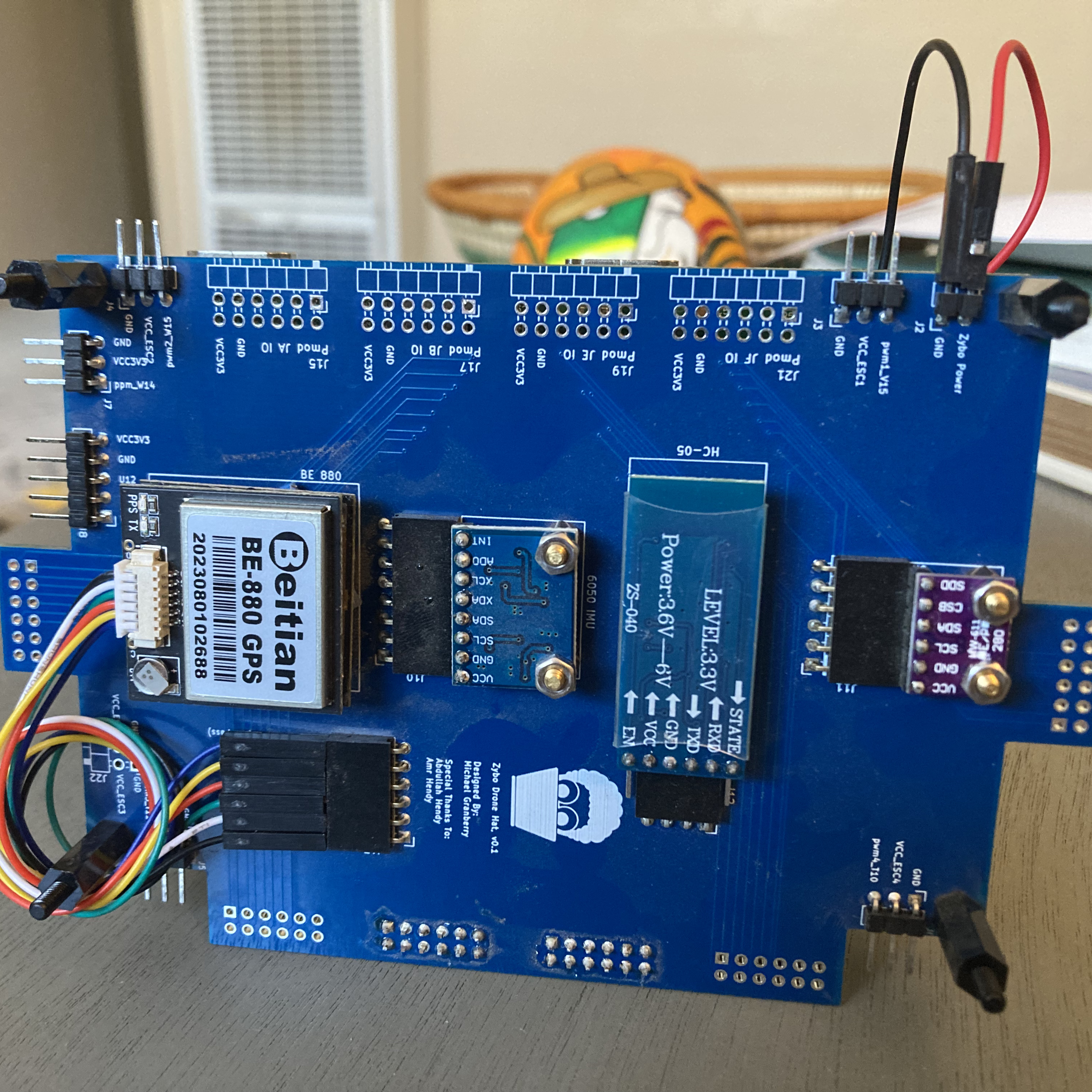
Xilinx Zynq-7000 Flight Controller
Xilinx Zynq-7000 SoC, C, Verilog, Vivado, Vitis, Sesnor Integration
This is a custom flight controller for a quadcopter drone, implemented on a Zynq-7000 SoC on the Zybo Z7-10 FPGA SoC Development Board. The flight controller uses PID controllers along with a MPU-6050 | 3 Axis Accelerometer Gyroscope for flight stability. Two flight modes are available: Rate Mode (Acro Mode) which uses a single loop PID controller and Stabilize Mode (Self-Leveling Mode) which uses a dual loop PID controller.
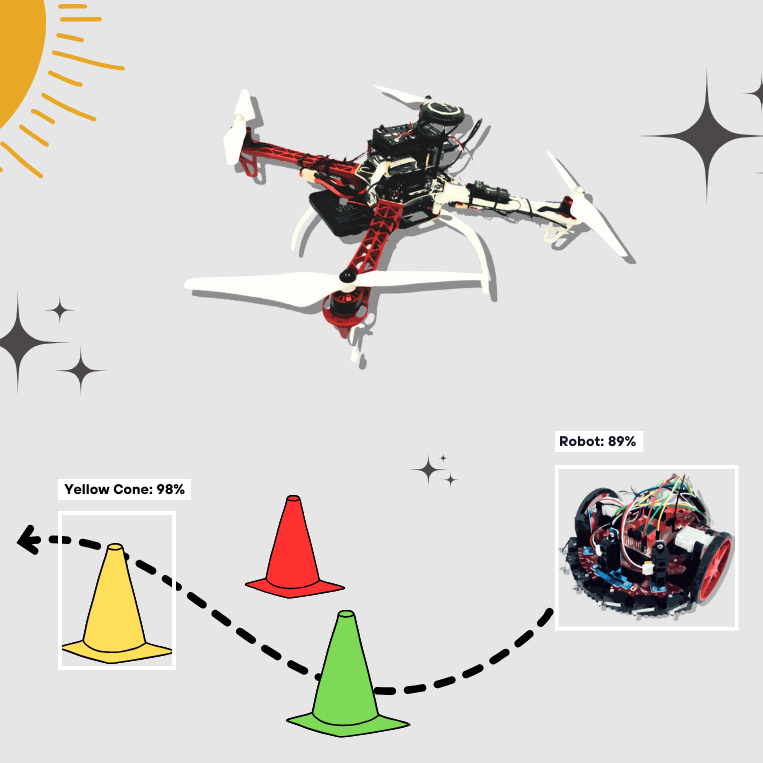
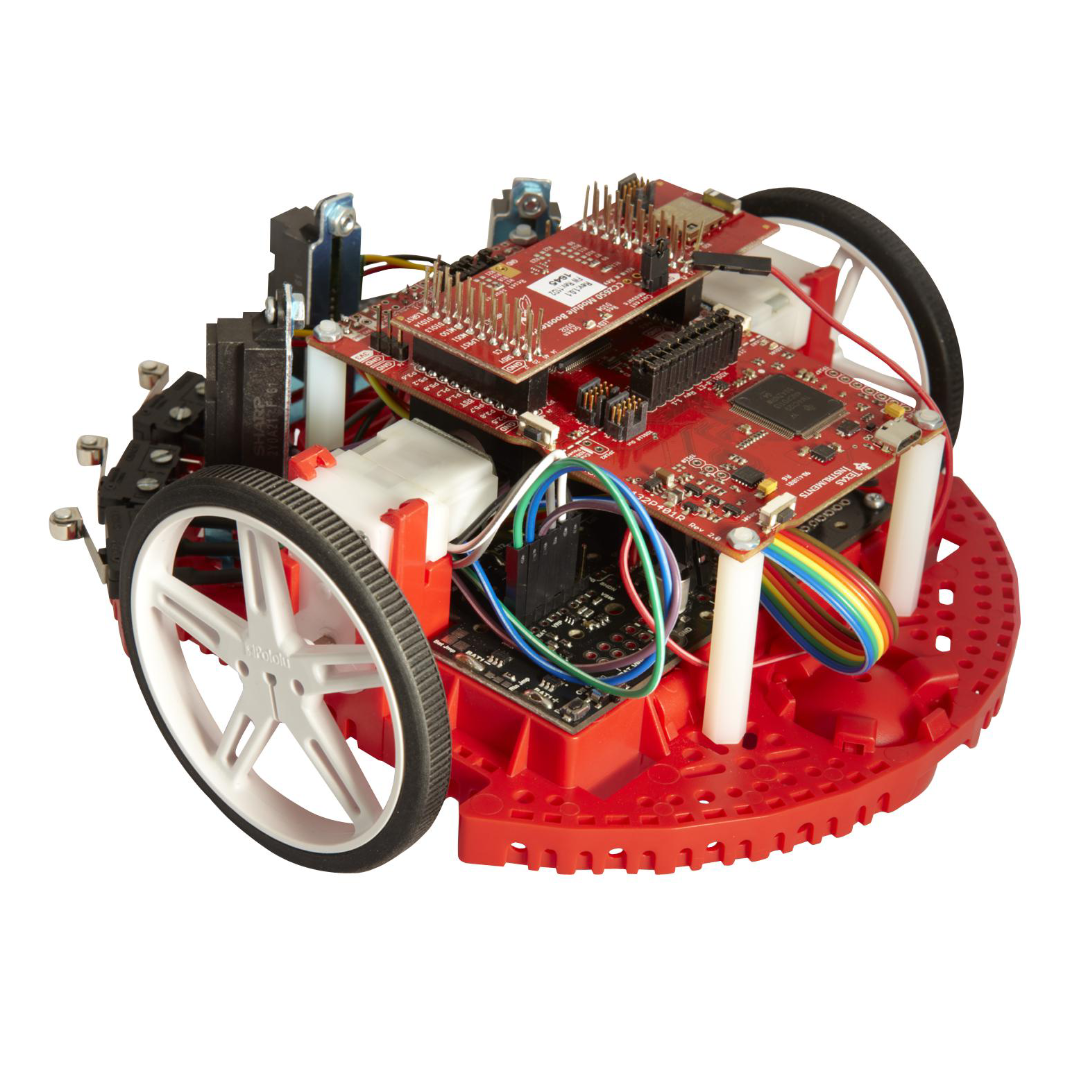
Mars Mission Emulation
C, Python, OpenCV, Raspberry Pi, TIMSP32 MCU, Drone, TI-RSLK Wheeled Robot, Ubuntu Linux
This project is an object detection drone wirelessly commanding a wheeled robot to perform tasks, mimicking the NASA's Mars Exploration Mission. The project was entered into an OpenCV competition in 2023 and was recognized and congratulated by the OpenCV CEO for being in the top 20 submissions.

Smart Pallet Autonomous Robot
ROS, Python, OpenCV, Jetson Nano, Sonar, LiDAR, Thermal Camera, Pi Camera, Ubuntu Linux
This project revolves around aggregating data from several different sensors, and fusing this information together using the Robot Operating System (ROS) on a Nvidia Jetson Nano to guide a Roomba successfully through obstacles. The robot fused multiple sonars, LiDAR, thermal camera, and a HD webcam.
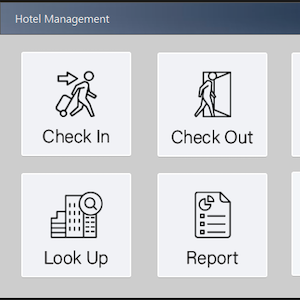
PR3 Hotel Management System
C#, .NET, WinForms, MS Test, JSON, Firebae Database
This application in C# allows the front desk employee to perform necessary operations such as check-in/check-out of a guest, view a report of available/occupied rooms, and look up the name of a particular guest along with their room number. Guess information is stored in Google's Realtime Firebase database.
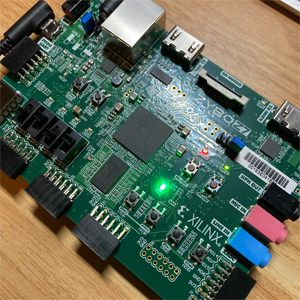
Xilinx FPGA Projects
VHDL, Vivado, Zybo Z7-10, VHDL, System Verilog
A collection of FPGA projects written in VHDL and System Verilog. The projects utilized several PMODs interfaced with the Zybo Z7-10 development board. The projects were developed in Xilinx Vivado.
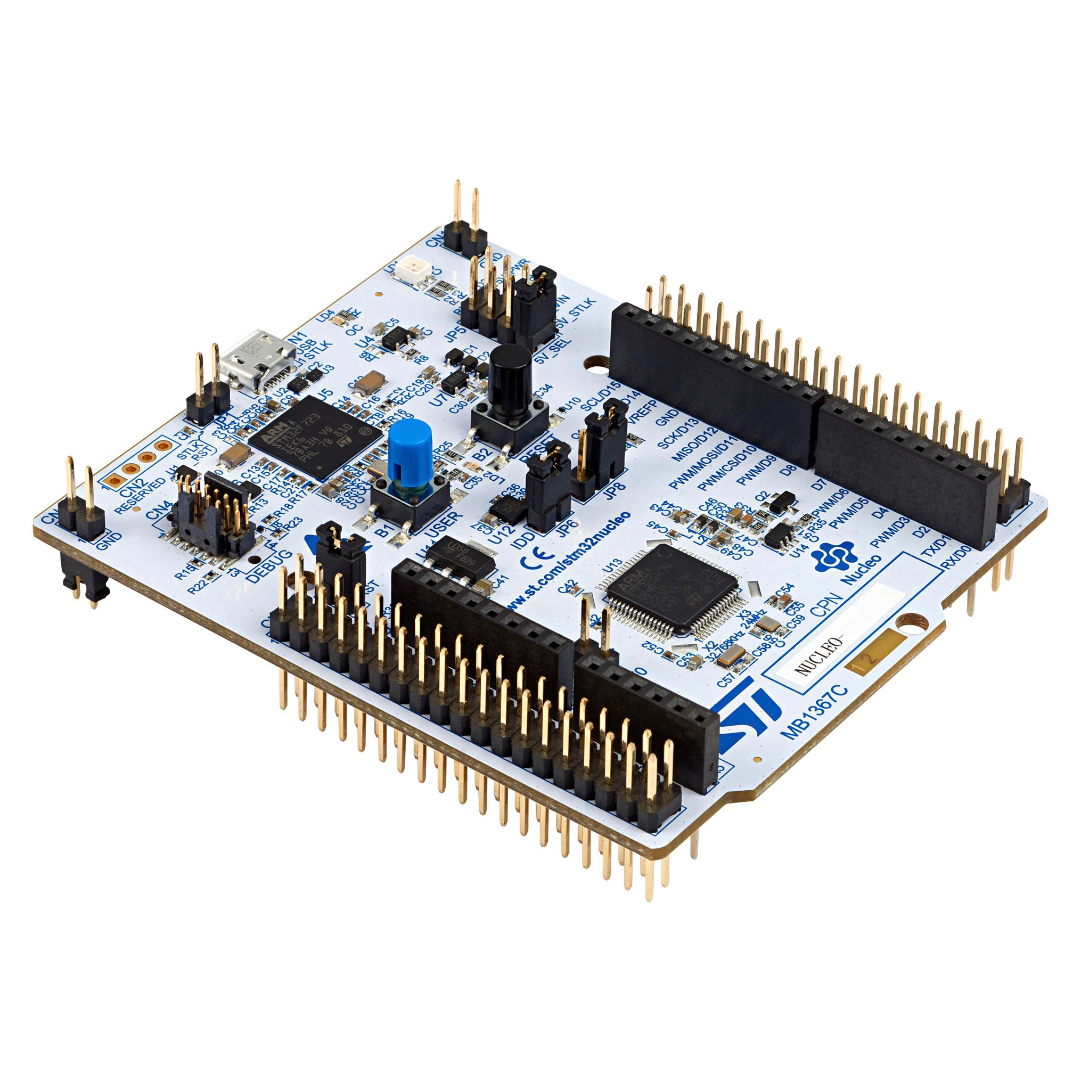
SoC Projects
Zybo Z7-10, STM32, Raspberry Pico, UART, I2C, DMA, Timers, Arm Architecture, FreeRtos, C++, C
A collection of SoC projects using various microcontrollers, such as a STM32 Nulceo board, Raspberry Pi Pico, and a Zybo Z7-10 development board. The projects utilized serval PMODs and microprocessor peripherals, and are written in C/Cpp.
Kian TI Robot Projects
TISMP32, TI-RSLK MAX, ADC, GPIO, I2C, UART, SPI, Sensors, Motors, PWM, Tachometer, PID Controller, C
A collection of robotics projects developed on the TI-RSLK robot kit. The projects span a broad range of topics from serial communication, tachometer, light sensors, distance sensors, timers, ACDs, GPIOs, and object avoidance / follower algorithms.
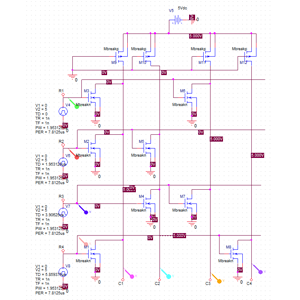
NOR-ROM Memory & D-FF Shift Register
PSPICE, CMOS, CD4007 IC, 7474 IC
This project consisted of designing, simulating, and building a 4x4 NOR-ROM memory unit using the CMOS CD4007 IC. The 2-to-4 decoder needed to test the 4X4 ROM is modeled by a 4-bit shift register. This is done by cascading four 7474 IC D-flipflops.
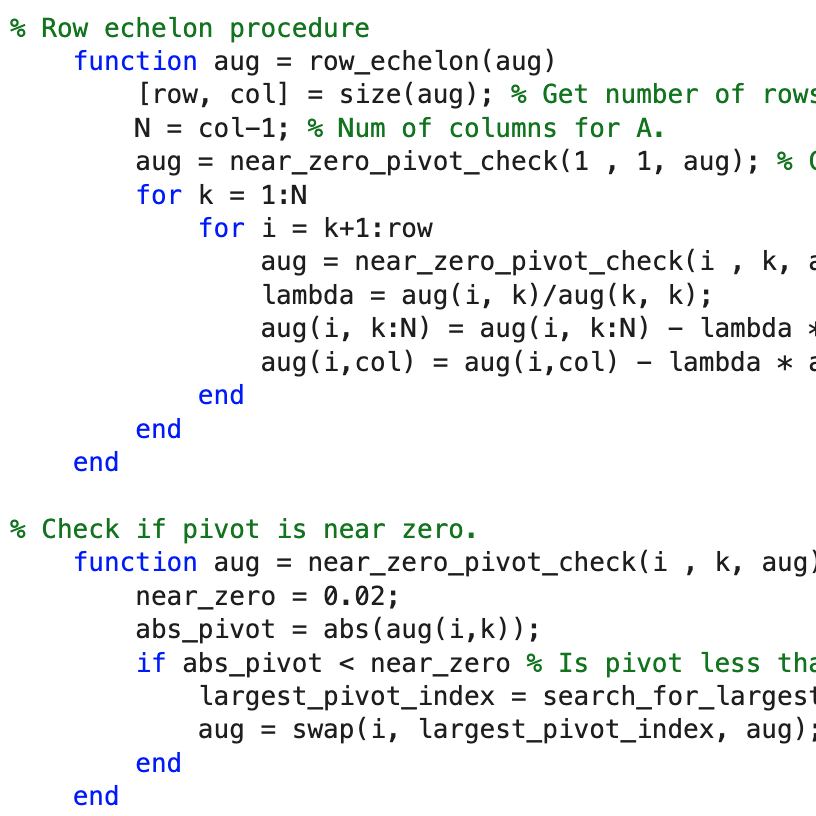
Gaussian Elimination
MatLab, Linear Algebra
This project consisted of recreating MATLAB's Reduced Row Echelon Form predefined function, rref(). The new function was used to solve a traffic flow density network by converting the network into a incidence matrix.
Experience
Work Experience
FPGA Design / Verification Engineer
Boeing
October 2024 – Present
El Segundo, CA
- Space Electronics
Mixed Signal ASIC Characterization Engineer
Teradyne
February 2024 – October 2024
Agoura Hills, CA
- Develop and implement ASIC characterization.
- Program and debug ASICs using bench top equipment.
Mixed Signal ASIC Engineer Intern
Teradyne
June 2023 – February 2024
Agoura Hills, CA
- Conducted ESD tests contributing to research on ASIC robustness and mitigation of ESD damage during user interactions.
- Created software for efficient testing and data reporting.
- Developed SystemVerilog code for an FPGA used for testing mixed-signal ASIC chips.
- Hardware setup for test development of mixed-signal ASIC test chips.
- Developed features and tools in VBA for the VBA IDE that significantly improved the team's coding productivity.
ECE Instructional Student Assistant – Digital Electronics Lab
California State University, Northridge ECE Department
February 2022 – May 2023
Northridge, CA
- Assisted students in building combinational and sequential digital circuits that met specific design requirements.
- Performed schematic design and simulations in PSPICE for circuit verification with students.
- Helped students debug their digital logic circuits.
- Developed lab experiments for the professor and prepared lab equipment for upcoming experiments.
ECE Instructional Student Assistant – Analog Electronics Lab
California State University, Northridge ECE Department
February 2022 – May 2023
Northridge, CA
- Assisted students in building circuits using diodes, BJTs, and MOSFETs that met specific design requirements.
- Performed schematic design and simulations in PSPICE for circuit verification with students.
- Held weekly office hours and tutorial sessions on designing fundamental BJT and MOSFET amplifiers.
- Helped students debug their analog circuits.
- Prepared lab equipment for upcoming lab experiments by calculating required circuit component values.
Project Experience
Robotics and Embedded Systems Engineer – Mars Mission Emulator
California State University, Northridge, ECE Department
August 2023 – December 2023
Northridge, CA
- Co-led Mars Mission Emulation project, that involved developing an object detection drone wirelessly commanding a wheeled robot to perform tasks.
- Recognized and congratulated by the OpenCV CEO for being in the top 20 submissions in an OpenCV AI competition, as well as won 3rd place in CSUN’s senior design contest.
- Developed embedded C code for a ground robot to interface with Bluetooth virtual UART, ADC, PWM to integrate various sensors and motors for object avoidance and follower algorithms.
- Created a custom image classification model in python for a drone to identify objects of interest using OpenCV and Google Coral TPU on a Raspberry Pi 4 model B.
Robotics Engineer – Smart Pallet Autonomous Robot
NASA JPL – California State University, Northridge Autonomy Research Center
August 2021 – May 2023
Northridge, CA
- Co-led Smart Pallet project, overseeing sensor integrated (multiple sonars, LiDAR, HD camera, thermal camera) with ROS (Robot Operating System) to develop an object avoidance algorithm on a Nvidia Jetson Nano.
- Utilized an image classification model to identify objects of interest with OpenCV.
- Created presentations to share and discuss progress, issues, and goals with the team.
Software Engineer – PR3 Hotel Management System
California State University, Northridge CS
August 2022 – December 2022
Northridge, CA
- Developed a hotel management system using C#, WinForms, and Google Firebase Realtime Database.
- Managed a team of 3 members by delegating tasks, reviewing their code, and offering feedback.
- Created UML class diagrams, CRC cards, and a system use case diagram to plan software development.
- Used Agile software engineering methodologies, Jira project management system, GIT, and GitHub to develop software.
Education
School
California State University, Northridge
Bachelor of Science: Computer Engineering, Cum Laude
Fall 2020 – Fall 2023
Northridge, CA
California State University, Northridge
Minor: Computer Science, Cum Laude
Fall 2020 – Fall 2023
Northridge, CA
Santa Monica College
Associate of Arts: General Science, Honors
Fall 2016 – Spring 2020
Santa Monica, CA
Certificates
Skills
- C/C++
- Python
- Verilog
- VHDL
- Xilinx Vivado
- Xilinx Vitis
- Intel Quartus
- Embedded Software
- FPGA Development
- ASIC Testing
- UART
- I2C
- SPI
- Linux
- GIT
- GitHub
- GitLab
- VBA
- C#
- Swift
- Java
- ARM
- MATLAB
- Unit Testing
- ROS (Robot Operating System)
- OrCAD Capture PSPICE
- LaTeX
- Testing Equipment
- Oscilloscope
- Function Generator
- DMM
- DC Power Supply
- Circuit Components Familiarity
- Raspberry Pi
- Zybo Z7-10
- Tutoring / Teaching
- Agile Development Process
- JIRA
- Project Management
- Microsoft Word
- Microsoft Excel
- Microsoft PowerPoint